
名古屋工業大学は14日、同大上村知也助教らの研究グループが、なぜチーターが地上で最も速く走れるかについて、数理モデルを用いて体幹の曲げ伸ばしによって高速走行を実現するメカニズムを解明したと発表した。この研究は、6日付(日本時間)の英国の学術誌Scientific Reportsにオンライン掲載された。
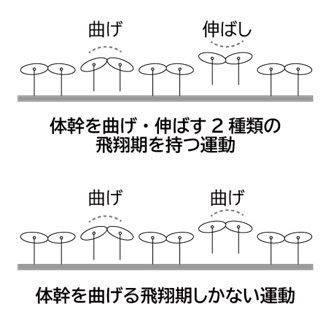
チーターの走行は、体幹(胴にあたる部分)を大きく曲げ伸ばしするのが特徴である。走行中に全ての足が地面を離れている期間を飛翔期というが、チーターはその飛翔期において体幹を曲げる飛翔期と体幹を伸ばす飛翔期の2種類を持つ。
ウマなどの動物は体幹を曲げる飛翔期しか持たないため、なぜチーターが2種類の飛翔期を持つことができるかその力学的メカニズムは不明確だった。
名古屋工業大学大学院工学研究科 上村知也助教、山口大学農学部 和田直己教授、京都大学大学院工学研究科 青井伸也准教授、同 松野文俊教授らの研究グループは、力学モデルを用いてそれを解明した。
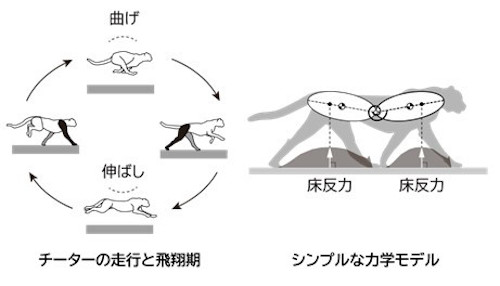
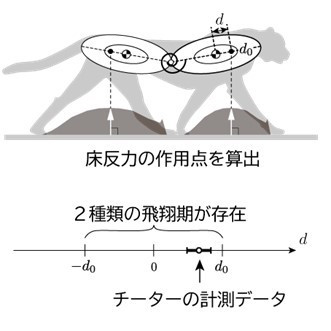
体幹の曲げ伸ばしと上下運動のみを抜き出したシンプルな力学モデルを構築し、その運動を解析的に表した結果、2種類の飛翔期を持つ運動が得られるための条件が、足が地面から受ける力(床反力)によって決定されることが示された。
また、実際の走行の計測データとの比較を行い、モデル解析から求められた条件が実際の運動時に満たされていることを確認した。さらに、2種類の飛翔期を持つことで運動の周期が短くなって高速走行を可能にしてことがわかった。
これが、チーターが地上で最高速の走行を実現しているメカニズムである。
今回の研究のようにシンプルな力学モデルを扱うことによって、動物の運動を生成する力学メカニズムとその背後にある原理が解明され、より深く動物の運動を理解することができる。また工学的には、運動能力に優れた脚ロボットなどの開発に役立つことが期待される。
画像提供:名古屋工業大学(冒頭の写真はイメージ)