
東京大学 生産技術研究所は1月27日、自律型無人水中探査機(AUV: Autonomous Underwater Vehicle)を港から発進させ、海底マッピングや海底インフラ設備の調査を行った後、自力で港へ戻る利用実証実験に成功したことを発表した。新たなAUVの利活用につながる可能性を示しており、インフラ設備の調査・検査への応用が期待できる。
海底地形の変動を詳細に把握することで地震や津波の予兆を知ることができるため、地震国である日本では詳細な海底地形図の頻繁な更新が不可欠である。また、海底の送水管やパイプライン、海底ケーブルなど生活に欠かせないインフラ設備についても、定期的な点検や位置確認が求められる。しかし、これまでは大型船を使った音響装置による地形調査や、ケーブルを介して人が操縦する遠隔操縦式探査機(ROV:Remotely Operated Vehicle)を使う調査が主流だった。
AUVは人が直接到達できない海中を探査する海中ロボットの一種で、自律的に動作する特徴がある。ROVに比べて行動範囲の制限がなく、必要な支援設備が少なく運用コストが小さいという利点がある。しかし、これまでは動力源に限りがあり長時間運用ができなかったため調査船などから運用する必要があり、海への投入や回収に人手を要していた。
東京大学 生産技術研究所などの研究チームは、センサを含めたAUVの研究開発を長年にわたり行い、実海域で使用可能な複数のAUVを開発した。今回の実験は、AUVを港から発進させることで、運用上の負担を軽減してAUV本来の利点を生かすことを目的とした。実験は、港から発進して海底をマッピングする航行型AUVの実証実験と、港から発進して目標物を精査するホバリング型AUVの実証実験の二つを実施した。
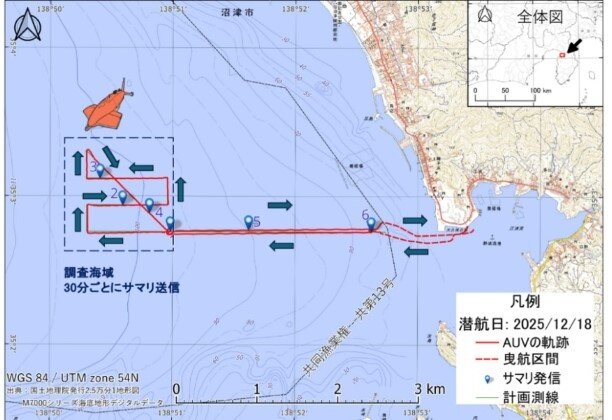
航行型AUVは広範囲を2~4ノット程度の高速で航行する。これによって、日本周囲において水平分解能の高い詳細な海底地形図を短期間で計測し、かつ頻繁に改訂できる可能性が示されている。これまでのAUVでは観測データは回収後のみに確認可能だったが、水中音響通信機能を通じて支援船にデータを転送するシステムを開発し、調査中でも取得できるようにした。今回の実証実験では、静岡県にある江浦湾の静浦港から発進したAUVが調査海域まで高度40mで航走、水深100mの調査海域では高度を6mに下げて調査を行い、調査終了後は再び静浦港へ航走した。
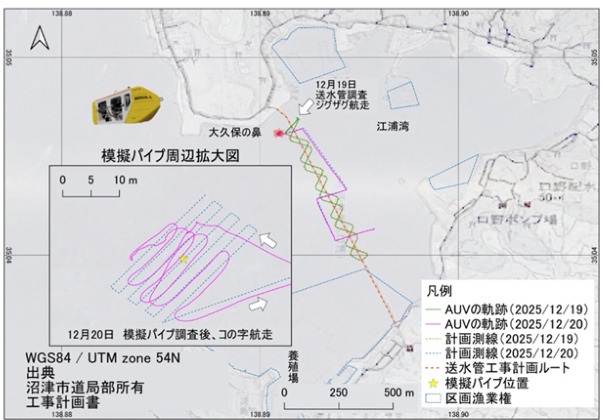
ホバリング型AUVは多くの推進機を持ち運動自由度が高く、調査対象に接近して詳細な観測ができる。これによって、海底のインフラ設備や遺失物などを詳細に調査できる可能性がある。今回の実証実験では、AUVに磁力計を搭載して、江浦湾の静浦港から対岸の内浦港に向けて敷設された海底送水管のおおよその位置を中心にジグザグに航走しながら往復し、送水管の調査を行った。
この研究により、港からAUVを発進する運用が、新たなAUVの利活用につながる可能性が示された。今後は、港湾施設や洋上風力設備、生活に欠かせないインフラ設備の調査・検査への応用を目指すとしている。
画像提供:東京大学 生産技術研究所(冒頭の写真は航行型AUV)