東北大学の多田隈建二郎准教授らのグループは14日、とがった物や柔らかい物など多様な物体をつかめるロボットハンドを開発した。ハンドの袋の素材に防刃生地を利用し、「耐切創性・耐久性」と「柔軟性」の両立を実現したことで、災害復旧現場の作業の効率化や迅速化が期待できるという。
同研究グループはこれまでに、形や大きさがまちまちな物でもつかむことができる袋型のロボットハンドを開発してきた。袋型のロボットハンドは内部に粉体を充填し、物体をつかんだ後に粉体部を真空にすることでつかむものの形状になじませ、複雑な形状や脆弱(ルビ:ぜいじゃく)な物体の損傷を抑えた形でつかむことが可能であった。しかし、従来の袋型ロボットハンドはとがった物をつかむ際に袋が破れるという問題があった。
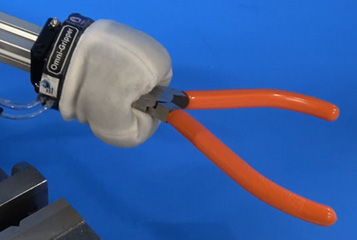
今回開発した袋型ロボットハンドは伸縮性のある防刃生地を使用することで、柔軟性を保ちながら優れた耐切創性を実現。防刃生地を先端が半球形状となる袋状にし、その表面に滑り止め用のシリコンゴムを塗布した構造の耐切創性カバーを構成した。これにより、鋭くとがった物に接触したり、刃物で切り付けたりしても破損しない高い耐切創性を持つロボットハンドを実現した。
この開発により、業者の安全を確保しつつ遠隔操作での作業が求められる災害現場において、瓦礫などの運搬や、バルブの開閉など直接環境と接する作業での活用に期待が高まる。同グループは内閣府の革新的研究開発推進プログラム「タフ・ロボティクス・チャレンジ」として、今後も耐久性向上など実用化を目指した研究を進めていく。

刃物による突き刺し
画像提供:科学技術振興機構