
東京海洋大学とソフトバンクは3日、可視光の無線通信技術によって水中ロボットをリアルタイムで遠隔制御する実証実験に世界で初めて成功したと発表した。
水中では電波は著しく減衰するため、制御に用いることはできない。音波は伝播速度が非常に遅く情報量も少ないため、やはり実用上に問題がある。それらに代わる安定した通信方法として、可視光を使用した無線通信技術の活用が研究されている。
光無線通信の特性としては、双方の光が見えていることが求められるため、通信距離は約100m程度が限界となる。さらに移動体との通信には、目標を的確に捉え続けるための高精度な光トラッキング技術が必要となる。
研究グループはこれらを解決する手法として、精度な画像処理によるトラッキング技術や光の明滅から信号に変換する技術である、OCC(Optical Camera Communication)を用いた。さらにThurayaの通信衛星を利用した無線通信を活用した。
今回の実証実験では、東京都港区のソフトバンク本社と実験場所の北海道厚岸湖の間を接続して、水中ロボットをリアルタイムで遠隔制御した。制御命令は衛星携帯により伝送されて、厚岸湖上に設置した水中ロボットの指令システムに入力、親機から子機にOCCの発光信号として伝えられる。水中ロボット子機はそれに従い機体を動作させ、完了すると動作完了の信号を親機に向かってOCCで伝送、親機は衛星携帯を介して遠隔地の操縦者に状況を知らせる。この方法で地上の電波が届かない厚岸湖の水面に分厚い氷が張った水中の狭い空間で水中ロボットを制御することができた。
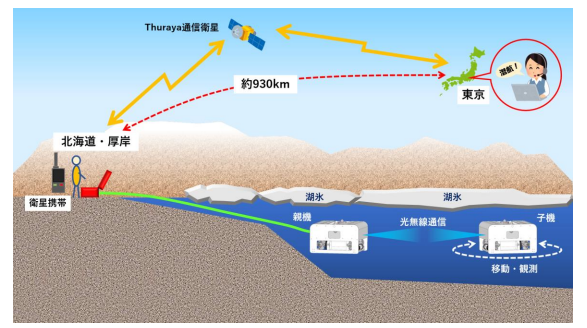
今回の実証実験より、アクセスが困難な地域や海域においても水中ロボットや機器のリアルタイムでの遠隔操作が可能になった。OCCは安定的かつリアルタイムにロボットとの通信が可能なため、海氷または湖氷の下などにおける漁業や調査での活用が見込まれる。研究グループは水中光無線通信技術によって、実用的な水中無線通信ネットワークの構築が可能になることで、海洋産業の効率化や新産業の創出など大きな経済効果が期待できるとしている。

画像提供:東京海洋大学(冒頭の写真はイメージ)